Simulação Híbrida: mHIL Steer
A solução mecânica Iterativa Hardware-in-the-Loop (mHIL) Steer combina um modelo computacional de veículo completo com um sistema físico de teste de direção e um corpo de prova para criar um ambiente de simulação no nível do veículo que permite aos engenheiros de desenvolvimento da direção referenciar, caracterizar, configurar, ajustar e validar sistemas de direção elétricos e hidráulicos nos níveis de subsistema e de veículo.
Aplicações
Corpos de prova de teste
Principais recursos do produto
Testes acelerados
As técnicas mHIL comprimem os cronogramas de desenvolvimento de veículos, permitindo uma significativa avaliação e validação de subsistemas e veículos no início do desenvolvimento, muito antes da disponibilidade de protótipos do veículo
Tecnologia inovadora
Componentes reais podem ser substituídos por componentes difíceis de modelar ao realizar simulações virtuais, melhorando a caracterização e o desenvolvimento do modelo
Economicamente rentável
Reduz o número de protótipos de veículos necessários, minimiza os custos de instrumentação e aquisição de dados e agiliza a validação final do campo de prova
Segurança aprimorada
Condições de falhas esperadas e inesperadas são detectadas mais facilmente e avaliadas com segurança em um ambiente de laboratório
Visão geral técnica

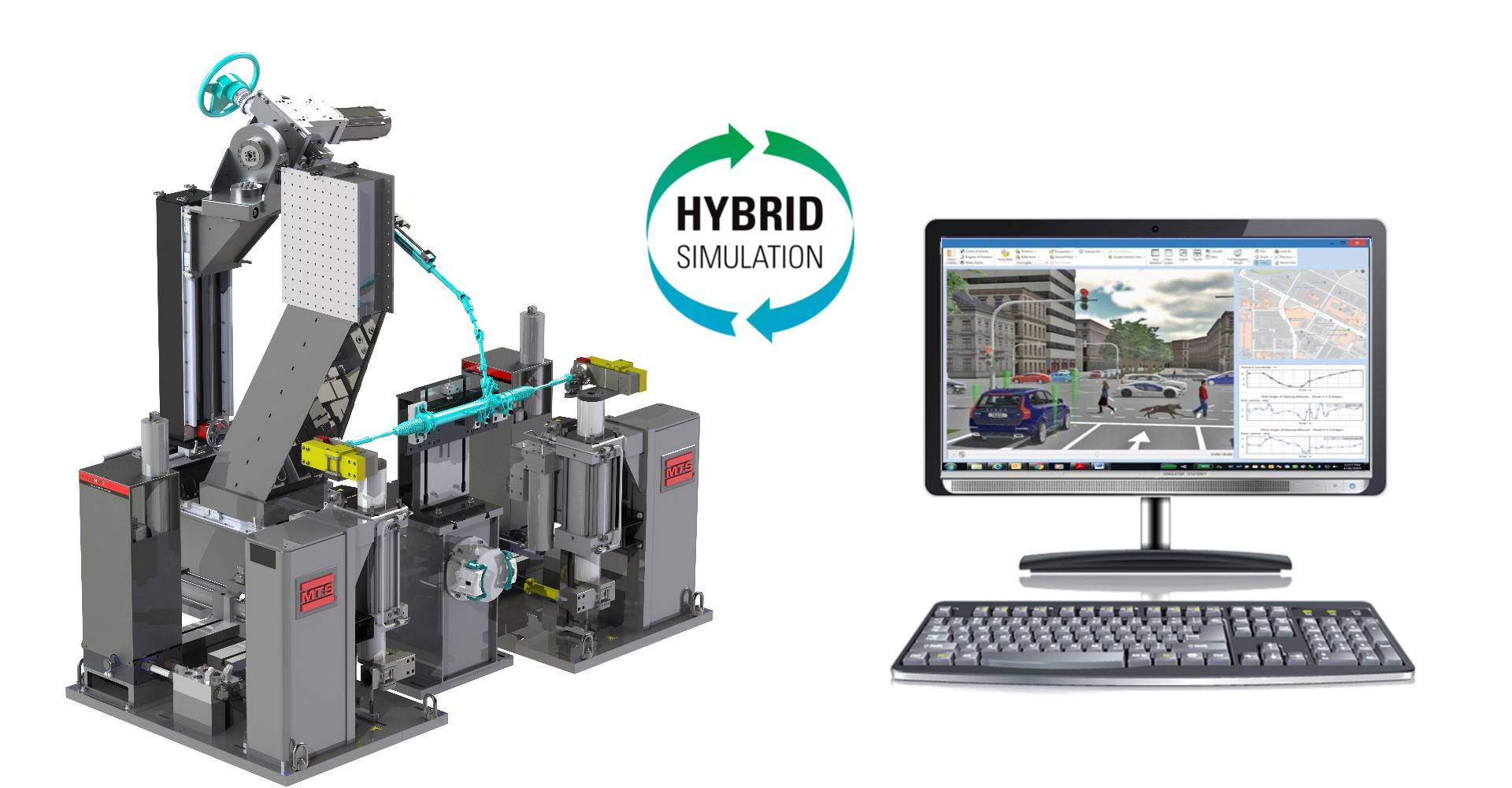
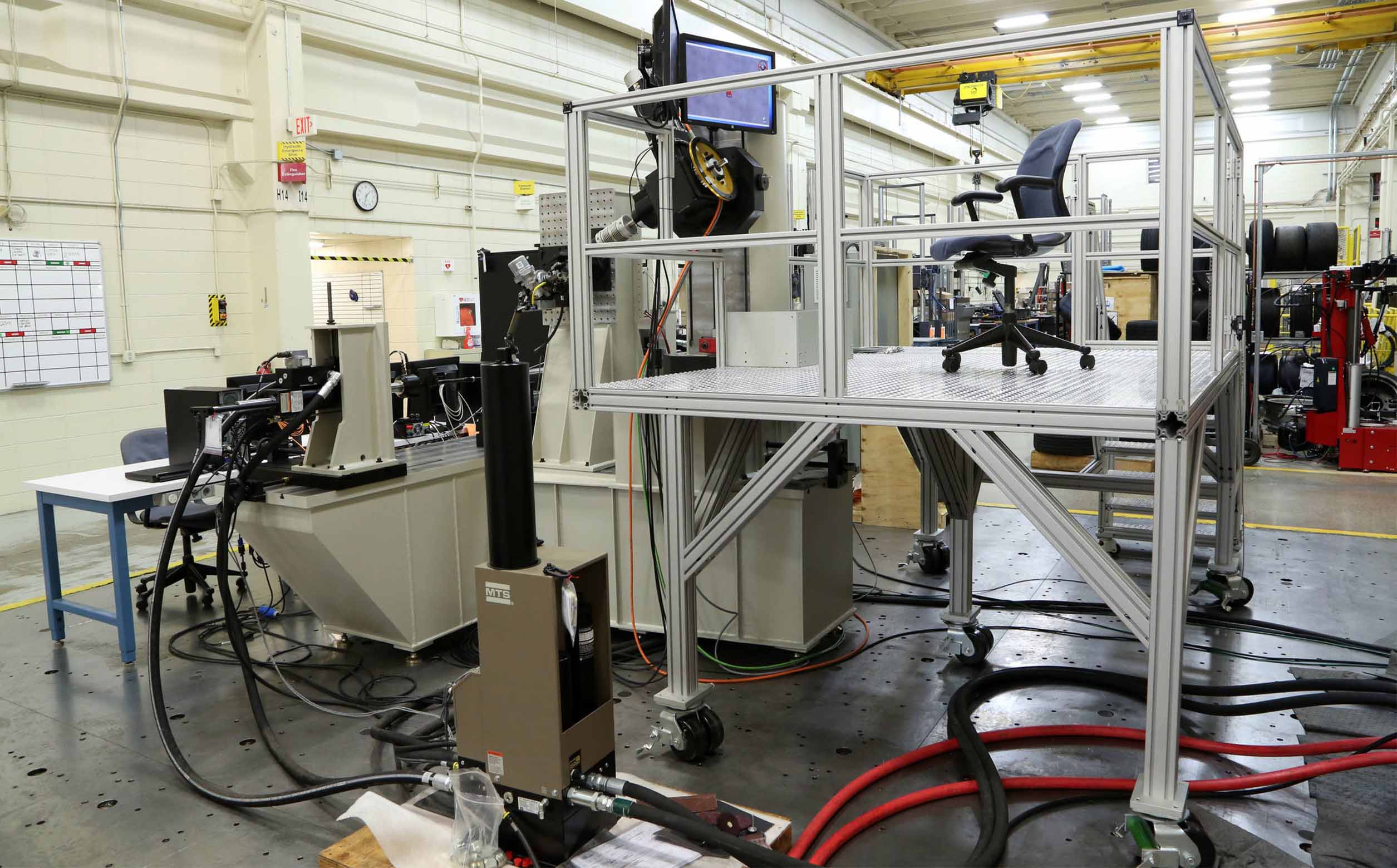
- Um sistema de teste de direção MTS com subsistema de direção personalizado instalado nele representa o hardware mecânico, que é colocado no lugar de elemento(s) modelado(s) da direção dentro de um modelo de simulação de veículo
- O subsistema de direção consiste no conjunto de cremalheira e pinhão de direção, tirantes, terminais de tirantes, eixo intermediário de entrada da direção e coluna de direção, juntamente com a fixação necessária para simular uma configuração realista do veículo.
- O sistema de direção é ativamente controlado por uma ECU.
- O sistema de direção e a ECU são conduzidos no veículo modelado em uma pista modelada como se estivessem em um veículo e pista reais.
O sistema de teste da direção aplica cargas e/ou deslocamentos ao hardware do amortecedor mecânico com base nas entradas do modelo de simulação do veículo, mede a resposta do hardware e depois envia estas respostas de volta para o modelo de simulação do veículo. O hardware mecânico é incluído "in the loop" com o veículo simulado.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Serviço e Suporte
Nossos especialistas estão aqui para ajudá-lo a permanecer em operação.