Transdutores de Força SWIFT® Evo Wheel Force
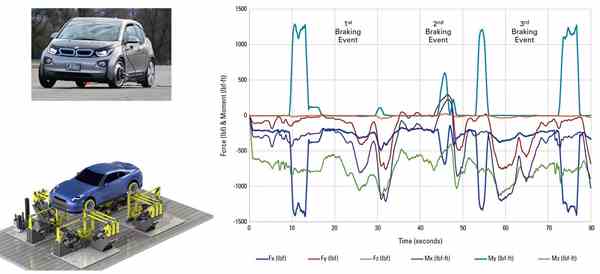
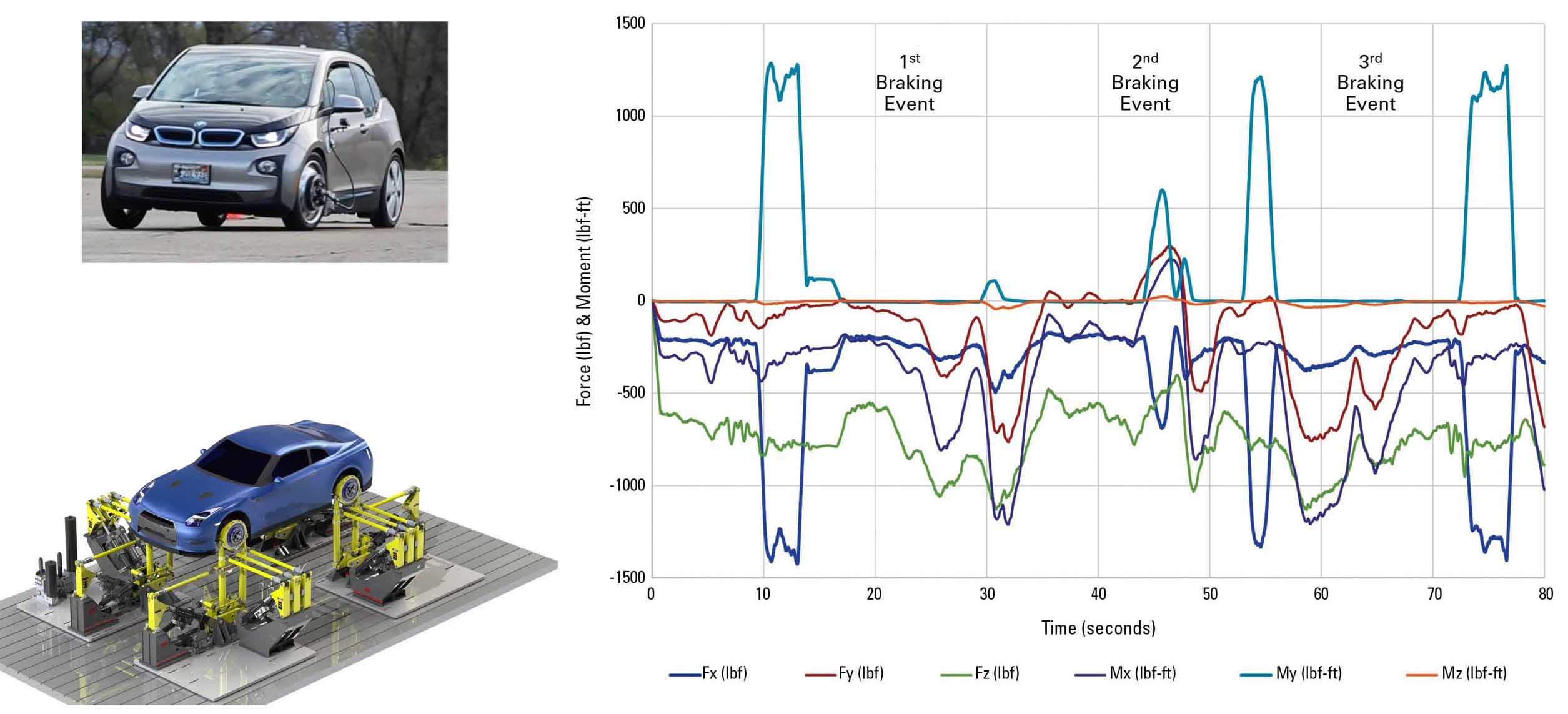
Garanta a integridade da medição de dados durante todo o processo de teste de durabilidade do veículo com transdutores Wheel Force SWIFT Evo de fácil utilização. Ideal para aplicações giratórias e não giratória, eles são usados no campo de prova para aquisição de dados de carga rodoviária (RLDA), e no laboratório de teste para iterar e reproduzir arquivos de acionamento RPC em simuladores de rodovia acoplados a fusos. Os transdutores SWIFT Evo empregam um design de alta rigidez, peça única e um processo único de calibração multiaxial para proporcionar precisão de medição e longa vida útil inigualáveis.
Aplicações
- Durabilidade
- Geração de Carga do Teste de Durabilidade
Corpos de prova de teste
- Veículos todo-o-terreno
- Motocicletas
- Carros de passageiro e SUVs
- Caminhões leves
- Veículos de automobilismo
Principais recursos do produto
Preciso
Precisão de medição e integridade inigualáveis alcançadas com alta rigidez, projeto de uma peça e calibração multiaxial
Robusto / Durável
Classificado por fadiga, usinado a partir de um tarugo forjado de alumínio AMS certificado de alta resistência e alta robustez ou titânio
Easy-to-use
A interface de usuário intuitiva Evo TI e as capacidades da TEDS simplificam e agilizam a configuração, orientação e operação
Controladores sincronizados
Baixa latência de ponta a ponta de 250 µsec permite uma sincronização rigorosa com outros transdutores, sensores e sistemas ativos do veículo
Visão geral técnica
|
Os transdutores SWIFT Evo alcançam precisão de medição inigualável e vida útil longa empregando um projeto de alta rigidez, em uma única peça, usinada a partir de um tarugo forjado de alumínio AMS certificado de alta resistência, alta robustez ou liga de titânio.
Único entre os transdutores de wheel force, este projeto testado aprovado produz alta sensibilidade, excelente comportamento linear e alta capacidade de sobrecarga. A alta frequência natural dos transdutores proporciona integridade de fase entre os canais medidos em toda a faixa de frequência operacional.
Sem juntas aparafusadas, o design de peça única elimina micro deslizamento - o maior contribuinte para a histerese - e facilita a transferência eficiente de calor através do sensor, minimizando os diferenciais de temperatura em áreas aferidas.
O projeto de uma peça também minimiza o número de bitolas necessárias, o que aumenta a confiabilidade e robustez do transdutor.
Um feixe de cisalhamento isolado de flexão MTS patenteado desacopla os seis componentes de medição do transdutor para reduzir o acoplamento transversal entre os eixos medidos. Isto aumenta a sensibilidade do transdutor a forças e momentos pontuais e minimiza a resposta térmica.
O anel externo de uma peça e a viga de cisalhamento se combinam para tornar o SWIFT Evo insensível às variações de rigidez entre os aros das rodas e os fixadores do simulador de estrada, facilitando a integração com ambos.
Os transdutores SWIFT Evo são testados para os requisitos SAE J267 e J328, assegurando uma vida útil longa quando devidamente mantidos. Selados às normas IP67, eles são praticamente à prova de intempéries e contaminantes.
Os transdutores SWIFT Evo são classificados para fadiga, de modo que a mesma unidade pode ser implantada em um veículo no campo de prova para RLDA e depois no laboratório para iteração de arquivos de acionamento e teste de durabilidade real, se desejado. |
|
||||||||||
 |
|
||||||||||
|
Faça o download dos arquivos CAD (.step) abaixo para explorar como o projeto robusto do transdutor de uma peça se manifesta em todo o portfólio SWIFT Evo - alumínio (a) e titânio (t). |
|||||||||||
| 40t | |||||||||||
|
|
|
||||||||||
|
|
|
||||||||||


|
A precisão da medição dos transdutores SWIFT Evo é assegurada através de um processo de calibração multiaxial fornecido exclusivamente pela MTS Metrology & Calibration.
Enquanto a maioria dos transdutores de wheel force são calibrados um canal de cada vez, as unidades SWIFT Evo estão sujeitas a um processo meticuloso e automatizado que calibra todo o transdutor, fazendo a ciclagem através de cada canal enquanto excita todos os outros. Esta abordagem permite medidas precisas de coeficientes de acoplamento transversal sob condições de carga muito mais realistas.
O transdutor wheel force SWIFT Evo calibrado é capaz de produzir dados que podem ser compartilhados entre unidades com altíssima fidelidade. Isto proporciona a flexibilidade de dedicar unidades específicas para RLDA, geração de arquivos de acionamento ou testes de durabilidade, enquanto mantém a integridade dos dados em todo o processo. |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
 |
 |
 |
||||||
|
Classificação máxima de carga calibrada |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
|
|
Força longitudinal (Fx) |
kN |
12 |
20 |
21 |
30 |
28 |
50 |
40 |
60 |
|
lb |
2,643 |
4,400 |
4,721 |
6,744 |
6,295 |
11,240 |
8,992 |
13,489 |
|
|
Força lateral (Fy) |
kN |
7 |
12 |
16 |
25 |
23 |
40 |
30 |
45 |
|
lb |
1,540 |
2,640 |
3,597 |
5,620 |
5,171 |
8,992 |
6,744 |
10,116 |
|
|
Força vertical (Fz) |
kN |
12 |
20 |
21 |
30 |
28 |
50 |
40 |
60 |
|
lb |
2,643 |
4,400 |
4,721 |
6,744 |
6,295 |
11,240 |
8,992 |
13,489 |
|
|
Momento de inversão (Mx) |
kN-m |
1.6 |
3 |
4 |
6 |
5 |
9 |
9 |
15 |
|
lb-ft |
1,180 |
2,235 |
2,950 |
4,425 |
3,688 |
6,638 |
6,638 |
11,063 |
|
|
Momento de acionamento/frenagem (My) |
kN-m |
2.2 |
3.5 |
5 |
8.5 |
7.5 |
13 |
13 |
20 |
|
lb-ft |
1,612 |
2,565 |
3,687 |
6,269 |
5,532 |
9,588 |
9,588 |
14,751 |
|
|
Momento de direção (Mz) |
kN-m |
1.6 |
3 |
4 |
6 |
5 |
9 |
9 |
15 |
|
lb-ft |
1,180 |
2,235 |
2,950 |
4,425 |
3,688 |
6,638 |
6,638 |
11,063 |
|
| Especificações operacionais | 10Al | 10Ti | 20Al | 20Ti | 30Al | 30Ti | 40Al | 40Ti | |
|
Nível de Ruído de pico-a-pico (0-500 Hz) |
N |
4 |
6 |
4 |
6 |
3 |
5 |
4 |
6 |
|
RPM máxima utilizável* |
RPM |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
|
Temperatura Máx de Operação |
°C |
125 |
125 |
125 |
125 |
125 |
125 |
125 |
125 |
|
°F |
257 |
257 |
257 |
257 |
257 |
257 |
257 |
257 |
|
|
Resistência a choques por eixo |
G |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
|
Classificação de Proteção Ambiental |
|
IP67 |
IP67 |
IP67 |
IP67 |
||||
|
Tensão de entrada necessária |
VDC |
10-28 |
10-28 |
10-28 |
10-28 |
||||
|
Potência de Entrada Necessária por Transdutor |
W |
6 |
6 |
6 |
6 |
||||
|
Tensão de saída da carga calibrada em escala real |
VDC |
±10 |
±10 |
±10 |
±10 |
||||
|
Classificação de Meio Eixo SAE J328 |
kg |
na
|
na
|
438 |
717 |
662 |
1,089 |
1,225 |
2,313 |
|
lb |
na
|
na
|
965 |
1,580 |
1,460 |
2,400 |
2,700 |
5,100 |
|
|
Momento de deformação SAE visto na cela |
kN-m |
1.45 |
4.76 |
3.1 |
4.5 |
4.8 |
8.0 |
9.5 |
15.5 |
|
lb-ft |
1,072 |
3507 |
2,305 |
3,292 |
3,544 |
5,893 |
6,977 |
11,466 |
|
*3000 rpm para testes com duração inferior a 30 minutos e ar de resfriamento a 200 mph
|
Especificação % |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
||
|
Não linearidade |
Força |
%FS |
0.4 (0.2) |
0.4 (0.2) |
0.3 (0.15) |
0.3 (0.15) |
0.2 (0.15) |
0.2 (0.15) |
0.3 (0.15) |
0.3 (0.15) |
|
Momento |
%FS |
0.7 (0.2) |
0.7 (0.2) |
0.5 (0.2) |
0.5 (0.2) |
0.3 (0.2) |
0.3 (0.2) |
0.5 (0.2) |
0.5 (0.2) |
|
|
Histerese |
Força |
%FS |
(0.2) 0.2 |
(0.2) 0.2 |
(0.1) 0.2 |
(0.1) 0.2 |
(0.1) 0.2 |
(0.1) 0.2 |
(0.1) 0.2 |
(0.1) 0.2 |
|
Momento |
%FS |
(0.2) 0.5 |
(0.2) 0.5 |
(0.2) 0.3 |
(0.2) 0.3 |
(0.2) 0.3 |
(0.2) 0.3 |
(0.2) 0.3 |
(0.2) 0.5 |
|
|
Crosstalk |
Fy → Fx, Fz |
%FS |
0.6 (0.2) |
0.6 (0.2) |
0.4 (0.25) |
0.4 (0.25) |
0.25 (0.2) |
0.25 (0.2) |
0.2 (0.2) |
0.2 (0.2) |
|
Fx ←→ Fz |
%FS |
0.6 (0.2) |
0.6 (0.2) |
0.5 (0.25) |
0.5 (0.25) |
0.3 (0.2) |
0.3 (0.2) |
0.3 (0.2) |
0.3 (0.2) |
|
|
Fx, Fz → Fy |
%FS |
0.5 (0.2) |
0.5 (0.2) |
0.5 (0.3) |
0.5 (0.3) |
0.4 (0.2) |
0.4 (0.2) |
0.25 (0.2) |
0.25 (0.2) |
|
** "Desempenho típico" listado é melhor ou igual ao nível de desempenho histórico mediano
|
Informações sobre a montagem |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
|
|
Transdutor |
kg |
1.2 |
1.9 |
3.1 |
4.8 |
4.3 |
6.3 |
8.5 |
12.4 |
|
lb |
2.7 |
4.2 |
6.8 |
10.6 |
9.4 |
13.9 |
18.8 |
27.3 |
|
|
Tamanho mínimo do aro |
mm |
177.8 |
177.8 |
304.8 |
304.8 |
330.2 |
330.2 |
381 |
381 |
|
pol |
7 |
7 |
12 |
12 |
13 |
13 |
15 |
15 |
|
|
Típico Lug Porca Parafuso Círculo |
mm |
Tudo |
Até 120 |
Até 120 |
Até 170 |
||||
|
Tipo do Conector de Saída |
|
BNC |
BNC |
BNC |
BNC |
||||
|
Calibração de desvio automático |
|
no veículo ou plataforma de teste |
em veículo ou plataforma deteste | em veículo ou plataforma deteste | em veículo ou plataforma deteste | ||||
|
Propriedades modais: Frequência |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
||
|
Com Pneu e Aro |
Mx, My |
Hz |
na | na |
325 |
na |
385 |
425 |
470 |
480 |
|
Fy |
Hz |
na | na |
610 |
na |
675 |
765 |
740 |
770 |
|
|
Sem pneu e aro |
My Mx, |
Hz |
na | na |
980 |
na |
845 |
810 |
810 |
775 |
|
Fy |
Hz |
na | na |
1,575 |
na |
1,255 |
1,445 |
1,490 |
1,570 |
|
Observações:
- As especificações estão sujeitas a mudanças sem aviso prévio.
- Com base nas cargas no centro do transdutor.
- Cada transdutor SWIFT Evo será calibrado em uma máquina de calibração MTS. A MTS fornece documentação completa dos valores de calibração por número de série para cada unidade SWIFT Evo. Os valores únicos de calibração são armazenados *eletronicamente e transferidos para a caixa de interface do transdutor (caixa Evo TI) enviada com cada sistema SWIFT Evo.
- Serviços periódicos de recalibração podem ser fornecidos pela MTS.
- A MTS pode fabricar aros projetados de acordo com os critérios da SAE J328. O projeto adequado do aro é essencial para um ótimo desempenho.
|
Os transdutores wheel force SWIFT Evo alcançam precisão de medição inigualável e vida útil longa empregando um projeto de alta rigidez, em uma única peça, usinada a partir de um tarugo forjado de alumínio AMS certificado de alta resistência, alta robustez ou liga de titânio.
Faça o download dos arquivos CAD (.step) abaixo para explorar como o projeto robusto do transdutor de uma peça se manifesta em todo o portfólio SWIFT Evo - alumínio (a) e titânio (t). |
 |
|||||||
|
|
||||||||
Livreto SWIFT Evo Wheel Force Transducer Livreto SWIFT Evo Services
Serviço e Suporte
Nossos especialistas estão aqui para ajudá-lo a permanecer em operação.
Produtos, peças ou acessórios relacionados
Software RPC Connect®
Controladores FlexTest®
Flat-Trac® Tire Force & Moment Measurement Systems
Flat-Trac Handling Roadway
Procurando por mais produtos?
Acesse o localizador de soluçãoContate hoje um representante da MTS
Pronto para uma cotação ou precisa de mais informações? Estamos aqui para ajudar. Solicite uma cotaçãoRecursos
Apresentando os controladores de desempenho FlexTest Elite
Aumente a contagem de canais, a taxa do sistema e a capac…
O caminho para a conexão RPC
Cody Johnson discute o passado, o presente e o futuro de sof…
As Origens do RPC com o Dr. Glen Grenier
P&R com o pioneiro dos testes de durabilidade sobre a ascens…
Preview do software RPC Connect: Webinar 1
Safa Mogharebi explora a nova Interface Gráfica do Usuário
Preview do software RPC Connect: Webinar 2
Safa Mogharebi explora os novos estágios de configuração e a…
Preview do software RPC Connect: Webinar 3
Safa Mogharebi explora os novos estágios de modelação e simu…
Preview do software RPC Connect: Webinar 4
Safa Mogharebi explora o novo estágio de teste