Simulación híbrida dirección mHIL
La solución dedirección mecánica Hardware-in-the-Loop (mHIL) combina un modelo computacional de vehículo completo con un sistema de prueba de dirección física y una probeta para crear un entorno de simulación a nivel de vehículo que permite a los ingenieros de desarrollo de dirección evaluar, caracterizar, configurar, ajustar y validar los sistemas de dirección asistida eléctrica e hidráulica a nivel de subsistema y del vehículo.
Aplicaciones
Probetas de prueba
Principales características del producto
Pruebas aceleradas
Las técnicas mHIL reducen los plazos de desarrollo de los vehículos al permitir la evaluación y validación de subsistemas y vehículos en una fase temprana del desarrollo, mucho antes de que estén disponibles los prototipos de los vehículos.
Tecnología innovadora
Los componentes reales se pueden reemplazar por componentes difíciles de modelar cuando se realizan simulaciones virtuales, lo que mejora la caracterización y el desarrollo de los modelos.
Rentable
Reduce el número de prototipos de vehículos necesarios, minimiza los costos de instrumentación y adquisición de datos y agiliza la validación final en el campo de pruebas.
Seguridad mejorada
Las condiciones de falla esperadas e inesperadas se detectan con mayor facilidad y se evalúan con seguridad en un entorno de laboratorio.
Resumen técnico

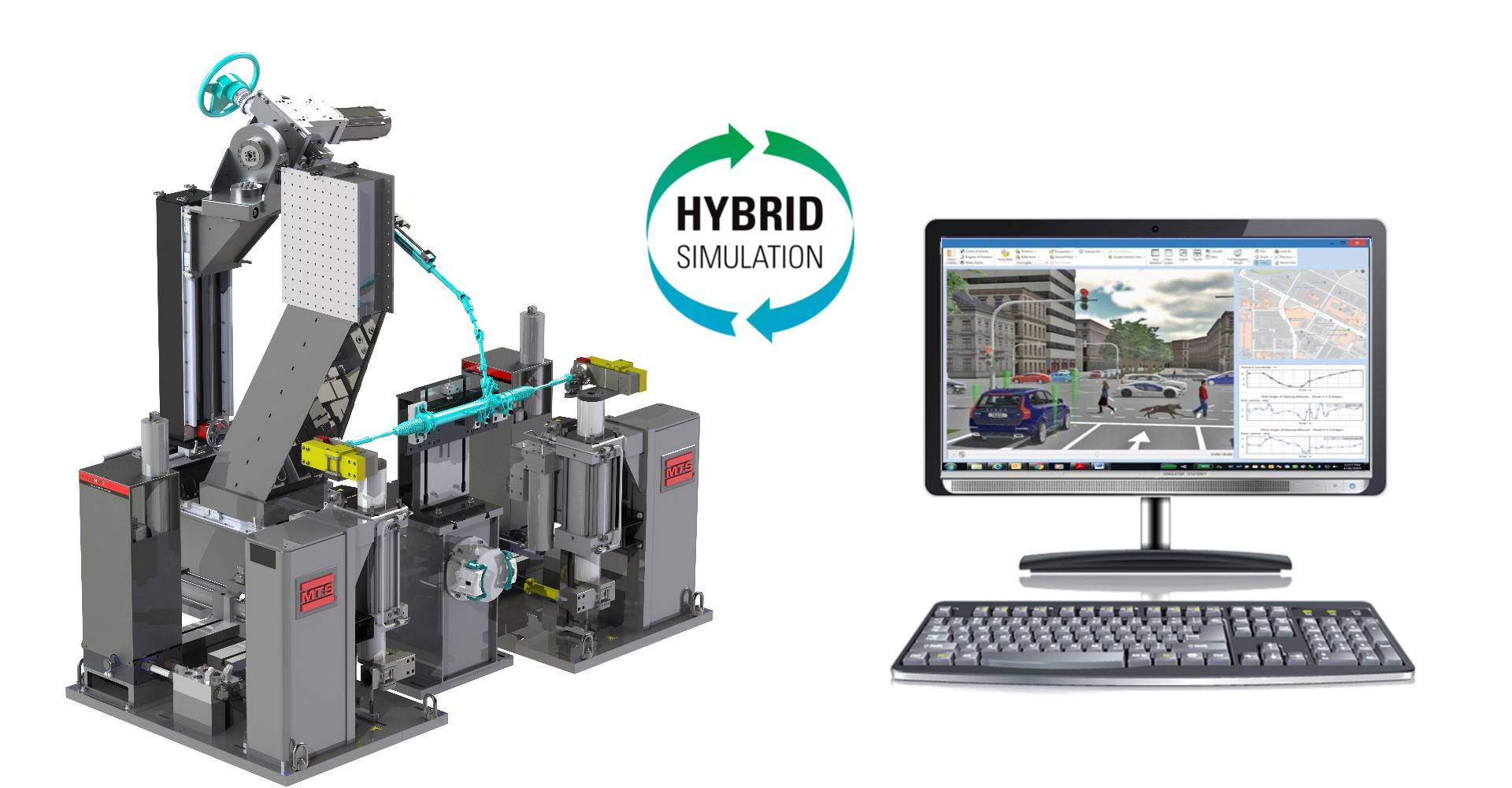
- Un sistema de prueba de la dirección MTS con el subsistema de dirección del cliente instalado en él representa el hardware mecánico, que se pone en lugar del elemento o elementos de dirección modelados dentro de un modelo de simulación del vehículo.
- El subsistema de dirección está formado por el conjunto de cremallera y piñón de dirección, las barras de acoplamiento, las rótulas de dirección, el eje de entrada de la dirección intermedia y la columna de dirección, junto con la fijación necesaria para simular una configuración real del vehículo.
- El sistema de dirección está controlado activamente por una ECU.
- El sistema de dirección y la ECU se conducen en el vehículo modelado en una pista modelada como si estuvieran en un vehículo y en una pista reales.
El sistema de prueba de la dirección aplica cargas y/o desplazamientos al hardware de la dirección mecánica en función de las entradas del modelo de simulación del vehículo, mide la respuesta del hardware y, después, envía estas respuestas de vuelta al modelo de simulación del vehículo. El hardware mecánico se incluye "en el bucle" con el vehículo simulado.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Servicio y soporte técnico
Nuestros expertos están aquí para ayudarlo a seguir funcionando en todo momento.