Transductores de fuerza de rueda SWIFT® Evo
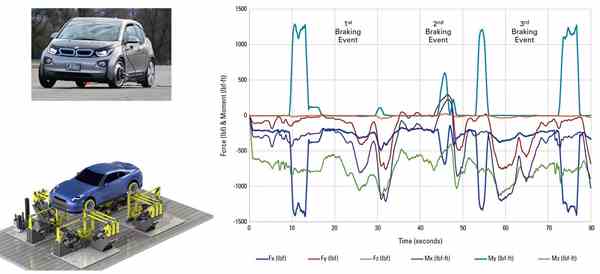
Garantice la integridad de las mediciones de datos a lo largo de todo el proceso de pruebas de durabilidad del vehículo con transductores de fuerza de rueda SWIFT Evo precisos, robustos y fáciles de usar. Ideales para aplicaciones giratorias y no giratorias, se utilizan en el campo de pruebas para Adquisición de datos de carga en carretera (RLDA) y en el laboratorio de pruebas para iterar y reproducir archivos de unidad RPC en simuladores de carretera acoplados a husillo. Los transductores SWIFT Evo cuentan con un diseño de alta rigidez de una sola pieza y un exclusivo proceso de calibración multiaxial para ofrecer una precisión de medición inigualable y una larga vida útil.
Aplicaciones
- Durabilidad
- Generación de cargas para pruebas de durabilidad
Probetas de prueba
- Vehículos todo terreno
- Motocicletas
- Vehículos de pasajeros y todoterrenos
- Camiones ligeros
- Vehículos de automovilismo
Principales características del producto
Preciso
Precisión e integridad de medición incomparables gracias a la alta rigidez, el diseño de una sola pieza y la calibración multiaxial.
Robusto / Durable
Resistente a la fatiga, mecanizado a partir de una palanquilla forjada de titanio o aluminio certificado AMS de alta resistencia y alta tenacidad.
Easy-to-use
La interfaz de usuario intuitiva de Evo TI y las capacidades de TEDS agilizan y simplifican la configuración, la orientación y el funcionamiento.
Sincronizado
La baja latencia de extremo a extremo de 250 µseg permite una sincronización estrecha con otros transductores, sensores y sistemas activos del vehículo.
Resumen técnico
|
Los transductores SWIFT Evo logran una precisión de medición sin precedentes y una larga vida útil al utilizar un diseño de alta rigidez y de una sola pieza mecanizado a partir de una palanquilla forjada de aleación de titanio o aluminio de alta tenacidad y alta resistencia certificada por AMS.
Único entre los transductores de fuerza de ruedas, este diseño probado ofrece alta sensibilidad, excelente comportamiento lineal y alta capacidad de sobrecarga. La alta frecuencia natural de los transductores proporciona integridad de fase entre los canales medidos en todo el rango de frecuencia de funcionamiento.
Al no tener juntas atornilladas, el diseño de una sola pieza elimina el microdeslizamiento, que es lo que más contribuye a la histéresis, y facilita la transferencia de calor eficiente a través del sensor, minimizando las diferencias de temperatura en las áreas calibradas.
El diseño de una pieza también minimiza la cantidad de calibres necesarios, lo que mejora la confiabilidad y robustez del transductor.
Una viga de corte por cizalladura aislada por flexión patentada por MTS desacopla los seis componentes de medición del transductor para reducir el acoplamiento cruzado entre los ejes medidos. Esto aumenta la sensibilidad del transductor a fuerzas y momentos mínimos y minimiza la respuesta térmica.
El anillo exterior de una sola pieza y la viga de corte por cizalladura se combinan para que el SWIFT Evo sea insensible a las variaciones de rigidez entre las llantas y los accesorios del simulador de carretera, lo que facilita la integración con ambos.
Los transductores SWIFT Evo se someten a pruebas según los requisitos de SAE J267 y J328, lo que garantiza una larga vida útil si se mantienen adecuadamente. Sellados según los estándares IP67, son prácticamente resistentes a la intemperie y a los contaminantes.
Los transductores SWIFT Evo son resistentes a la fatiga, por lo que la misma unidad puede instalarse en un vehículo en el campo de pruebas para la RLDA y luego en el laboratorio para la iteración del archivo de conducción y prueba de durabilidad real si se desea. |
|
||||||||||
 |
|
||||||||||
|
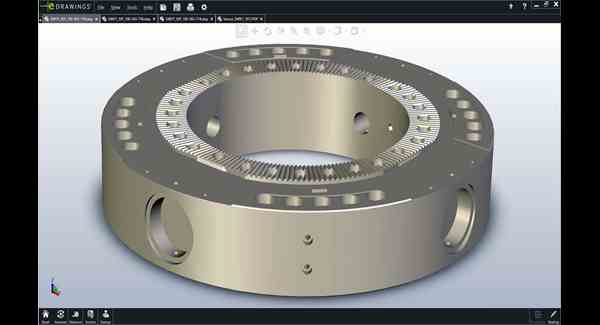
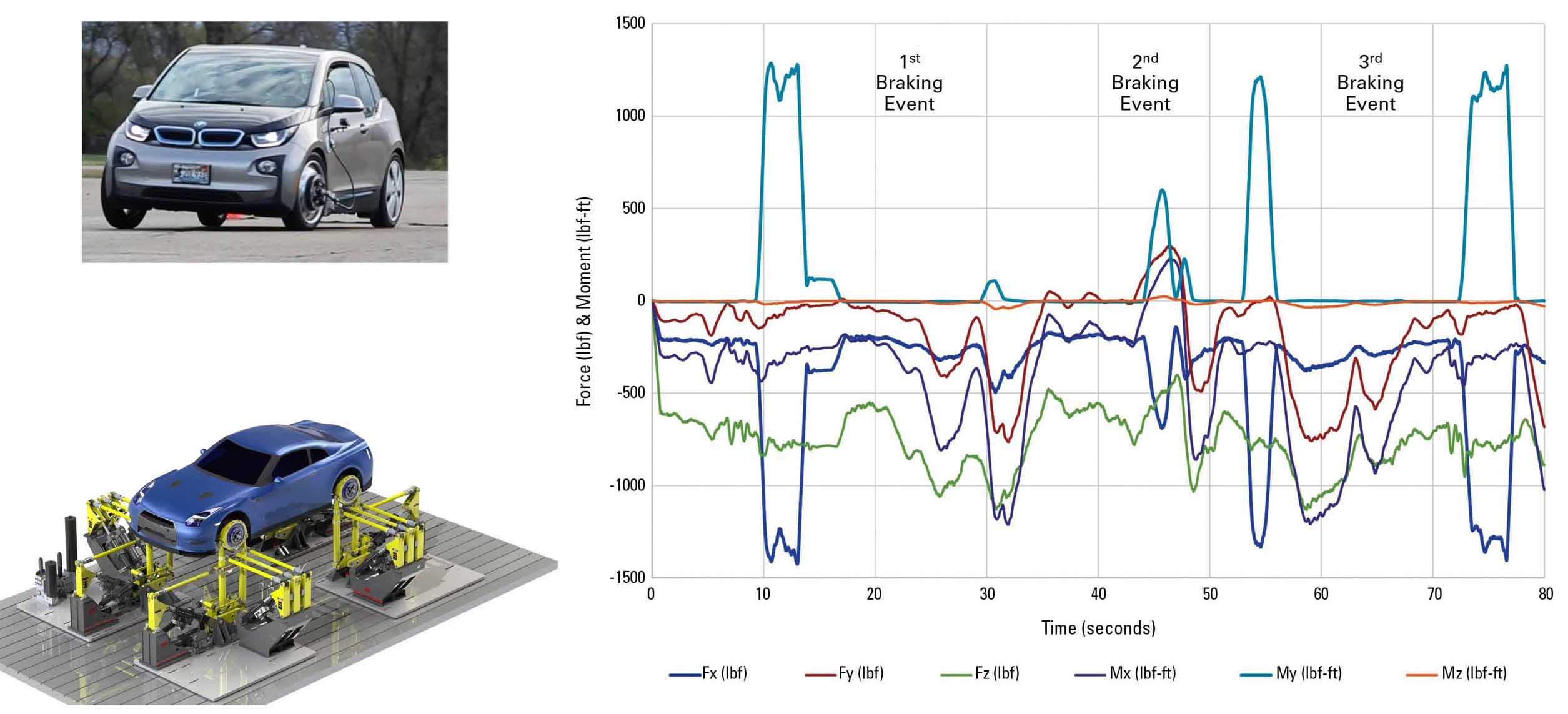
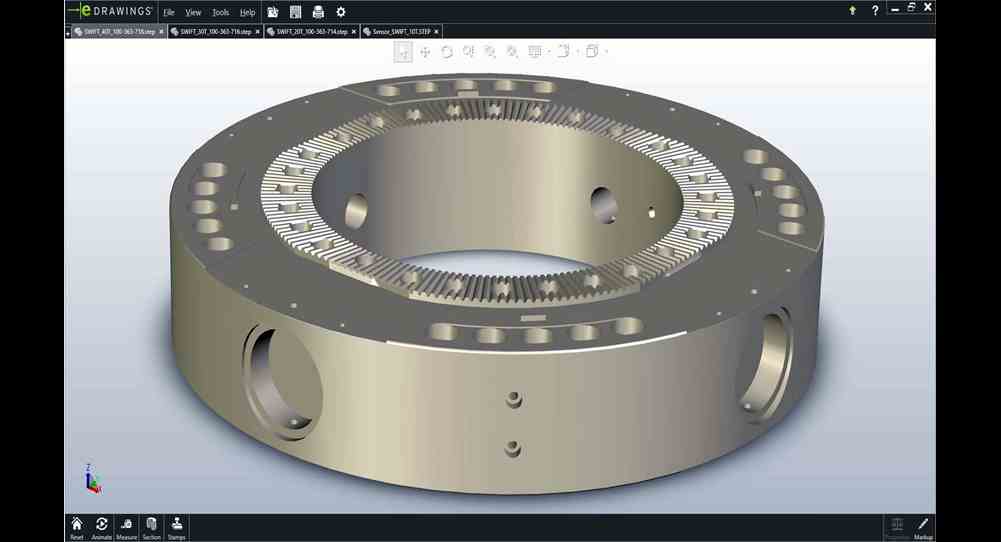
Descargue los archivos CAD (.step) a continuación para explorar cómo se manifiesta el robusto diseño del transductor de una sola pieza en toda la cartera de SWIFT Evo: aluminio (a) y titanio (t). |
|||||||||||
| 40t | |||||||||||
|
|
|
||||||||||
|
|
|
||||||||||


|
La precisión de medición de los transductores SWIFT Evo se garantiza mediante un proceso de calibración multiaxial proporcionado exclusivamente por MTS Metrología y Calibración.
Si bien la mayoría de los transductores de fuerza de ruedas se calibran un canal a la vez, las unidades SWIFT Evo están sujetas a un proceso meticuloso y automatizado que calibra todo el transductor, recorriendo cada canal mientras excita a todos los demás. Este enfoque permite mediciones precisas de coeficientes de acoplamiento cruzado en condiciones de carga mucho más realistas.
El transductor de fuerza de ruedas SWIFT Evo calibrado es capaz de producir datos que se pueden compartir entre unidades con muy alta fidelidad. Esto brinda la flexibilidad de dedicar unidades específicas para la RLDA, la generación de archivos de unidades o pruebas de durabilidad, mientras se mantiene la integridad de los datos en todo el proceso. |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
 |
 |
 |
||||||
|
Tasas máximas de carga calibrada |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
|
|
Fuerza longitudinal (Fx) |
kN |
12 |
20 |
21 |
30 |
28 |
50 |
40 |
60 |
|
lb |
2,643 |
4,400 |
4,721 |
6,744 |
6,295 |
11,240 |
8,992 |
13,489 |
|
|
Fuerza lateral (Fy) |
kN |
7 |
12 |
16 |
25 |
23 |
40 |
30 |
45 |
|
lb |
1,540 |
2,640 |
3,597 |
5,620 |
5,171 |
8,992 |
6,744 |
10,116 |
|
|
Fuerza vertical (Fz) |
kN |
12 |
20 |
21 |
30 |
28 |
50 |
40 |
60 |
|
lb |
2,643 |
4,400 |
4,721 |
6,744 |
6,295 |
11,240 |
8,992 |
13,489 |
|
|
Momento de vuelco (Mx) |
kN-m |
1.6 |
3 |
4 |
6 |
5 |
9 |
9 |
15 |
|
lb-ft |
1,180 |
2,235 |
2,950 |
4,425 |
3,688 |
6,638 |
6,638 |
11,063 |
|
|
Momento de conducción/frenado (My) |
kN-m |
2.2 |
3.5 |
5 |
8.5 |
7.5 |
13 |
13 |
20 |
|
lb-ft |
1,612 |
2,565 |
3,687 |
6,269 |
5,532 |
9,588 |
9,588 |
14,751 |
|
|
Momento de dirección (Mz) |
kN-m |
1.6 |
3 |
4 |
6 |
5 |
9 |
9 |
15 |
|
lb-ft |
1,180 |
2,235 |
2,950 |
4,425 |
3,688 |
6,638 |
6,638 |
11,063 |
|
| Especificaciones operacionales | 10Al | 10Ti | 20Al | 20Ti | 30Al | 30Ti | 40Al | 40Ti | |
|
Nivel de ruido de pico a pico (0-500 Hz) |
N |
4 |
6 |
4 |
6 |
3 |
5 |
4 |
6 |
|
RPM máx. utilizables* |
RPM |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
2400 |
|
Temperatura máx. de funcionamiento |
°C |
125 |
125 |
125 |
125 |
125 |
125 |
125 |
125 |
|
°F |
257 |
257 |
257 |
257 |
257 |
257 |
257 |
257 |
|
|
Resistencia a los golpes en cada eje |
G |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
60 |
|
Calificaciónde protecciónambiental |
|
IP67 |
IP67 |
IP67 |
IP67 |
||||
|
Tensión de entrada necesaria |
V CC |
10-28 |
10-28 |
10-28 |
10-28 |
||||
|
Potenciade entrada necesariaportransductor |
W |
6 |
6 |
6 |
6 |
||||
|
Carga calibrada de la tensión de salida a escala completa |
V CC |
±10 |
±10 |
±10 |
±10 |
||||
|
Clasificación SAE J328 de medio eje |
kg |
na
|
na
|
438 |
717 |
662 |
1,089 |
1,225 |
2,313 |
|
lb |
na
|
na
|
965 |
1,580 |
1,460 |
2,400 |
2,700 |
5,100 |
|
|
Momento de curvatura SAE visto en la celda |
kN-m |
1,45 |
4,76 |
3,1 |
4,5 |
4,8 |
8,0 |
9,5 |
15,5 |
|
lb-ft |
1072 |
3507 |
2305 |
3292 |
3544 |
5893 |
6977 |
11.466 |
|
*3000 rpm para pruebas que duren menos de 30 minutos y aire de enfriamiento de 200 mph
|
Especificación % |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
||
|
Falta de linealidad |
Fuerza |
% FS |
0,4 (0,2) |
0,4 (0,2) |
0,3 (0,15) |
0,3 (0,15) |
0,2 (0,15) |
0,2 (0,15) |
0,3 (0,15) |
0,3 (0,15) |
|
Momento |
% FS |
0,7 (0,2) |
0,7 (0,2) |
0,5 (0,2) |
0,5 (0,2) |
0,3 (0,2) |
0,3 (0,2) |
0,5 (0,2) |
0,5 (0,2) |
|
|
Histéresis |
Fuerza |
% FS |
(0,2) 0,2 |
(0,2) 0,2 |
(0,1) 0,2 |
(0,1) 0,2 |
(0,1) 0,2 |
(0,1) 0,2 |
(0,1) 0,2 |
(0,1) 0,2 |
|
Momento |
% FS |
(0,2) 0,5 |
(0,2) 0,5 |
(0,2) 0,3 |
(0,2) 0,3 |
(0,2) 0,3 |
(0,2) 0,3 |
(0,2) 0,3 |
(0,2) 0,5 |
|
|
Diafonía |
Fy → Fx, Fz |
% FS |
0,6 (0,2) |
0,6 (0,2) |
0,4 (0,25) |
0,4 (0,25) |
0,25 (0,2) |
0,25 (0,2) |
0,2 (0,2) |
0,2 (0,2) |
|
Fx ←→ Fz |
% FS |
0,6 (0,2) |
0,6 (0,2) |
0,5 (0,25) |
0,5 (0,25) |
0,3 (0,2) |
0,3 (0,2) |
0,3 (0,2) |
0,3 (0,2) |
|
|
Fx, Fz → Fy |
% FS |
0,5 (0,2) |
0,5 (0,2) |
0,5 (0,3) |
0,5 (0,3) |
0,4 (0,2) |
0,4 (0,2) |
0,25 (0,2) |
0,25 (0,2) |
|
** El “Rendimiento típico” que se indica es mejor o igual que el nivel de rendimiento histórico medio.
|
Información de montaje |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
|
|
Transductor |
kg |
1,2 |
1,9 |
3,1 |
4,8 |
4,3 |
6,3 |
8,5 |
12,4 |
|
lb |
2,7 |
4,2 |
6,8 |
10,6 |
9,4 |
13,9 |
18,8 |
27,3 |
|
|
Tamaño mínimo de la llanta: |
mm |
177,8 |
177,8 |
304,8 |
304,8 |
330,2 |
330,2 |
381 |
381 |
|
in |
7 |
7 |
12 |
12 |
13 |
13 |
15 |
15 |
|
|
Círculotípicode los tornillosde las tuercasde los neumáticos |
mm |
Todos |
Hasta 120 |
Hasta 120 |
Hasta 170 |
||||
|
Salida de tipo de conector |
|
BNC |
BNC |
BNC |
BNC |
||||
|
Calibración automática de la derivación |
|
envehículo o en dispositivo para pruebas |
en vehículo o en dispositivo para pruebas | en vehículo o en dispositivo para pruebas | en vehículo o en dispositivo para pruebas | ||||
|
Propiedades modales: Frecuencia |
10Al |
10Ti |
20Al |
20Ti |
30Al |
30Ti |
40Al |
40Ti |
||
|
Con neumático y llanta |
Mx, My |
Hz |
na | na |
325 |
na |
385 |
425 |
470 |
480 |
|
Fy |
Hz |
na | na |
610 |
na |
675 |
765 |
740 |
770 |
|
|
Sin neumático y llanta |
My Mx, |
Hz |
na | na |
980 |
na |
845 |
810 |
810 |
775 |
|
Fy |
Hz |
na | na |
1,575 |
na |
1,255 |
1,445 |
1,490 |
1,570 |
|
Notas:
- Las especificaciones están sujetas a cambios sin previo aviso.
- En base a las cargas en el centro del transductor.
- Cada transductor SWIFT Evo se calibrará en una máquina de calibración MTS. MTS proporciona documentación completa de los valores de calibración por número de serie para cada unidad SWIFT Evo. Los valores de calibración únicos se almacenan *electrónicamente y se transfieren a la caja de interfaz del transductor (caja Evo TI) que se envía con cada sistema SWIFT Evo.
- MTS puede ofrecer servicios periódicos de recalibración.
- MTS puede fabricar llantas diseñadas de acuerdo con los criterios de SAE J328. El diseño adecuado de la llanta es esencial para un rendimiento óptimo.
|
Los transductores de fuerza de ruedas SWIFT Evo logran una precisión de medición sin precedentes y una larga vida útil al utilizar un diseño de alta rigidez y de una sola pieza mecanizado a partir de una palanquilla forjada de aluminio o aleación de titanio de alta resistencia y alta tenacidad certificados por AMS.
Descargue los archivos CAD (.step) a continuación para explorar cómo se manifiesta el robusto diseño del transductor de una sola pieza en toda la cartera de SWIFT Evo: aluminio (a) y titanio (t). |
 |
|||||||
|
|
||||||||
Folleto del transductor de fuerza de rueda SWIFT Evo Folleto de servicios para SWIFT Evo
Servicio y soporte técnico
Nuestros expertos están aquí para ayudarlo a seguir funcionando en todo momento.
Productos, piezas o accesorios relacionados
Software RPC® Connect
Controladores FlexTest®
Sistemas Flat-Trac® para medir la fuerza y el momento de los neumáticos
Carretera de manejo Flat-Trac
¿Busca más productos?
Ir al Buscador de solucionesComuníquese hoy mismo con un representante de MTS
¿Desea solicitar un presupuesto o necesita más información? Estamos aquí para ayudarlo. Solicite una cotizaciónRecursos
Presentamos los controladores FlexTest Elite Performance
Aumente el número de canales, la velocidad del sistema y …
El camino hacia RPC Connect
Cody Johnson analiza el software RPC: pasado, presente y fut…
Los orígenes del RPC con el Dr. Glen Grenier
Entrevista con el pionero de las pruebas de durabilidad sobr…
Vista previa del software RPC Connect: Seminario web 1
Safa Mogharebi analiza la nueva interfaz gráfica de usuario
Vista previa del software RPC Connect: Seminario web 2
Safa Mogharebi analiza las nuevas etapas de configuración y …
Vista previa del software RPC Connect: Seminario web 3
Safa Mogharebi analiza las nuevas etapas de modelado y simul…
Vista previa del software RPC Connect: Seminario web 4
Safa Mogharebi analiza la nueva etapa de pruebas