
디지털 제어 시스템에 익숙하지 않은 사용자는 샘플 속도가 높을수록 제어 충실도가 더 좋다고 생각합니다.샘플 속도가 증가함에 따라 제어 충실도가 향상되는 것은 맞지만 특정 지점까지만 개선됩니다. 제어는 기본적으로 아날로그 모드이므로 해당 지점을 넘어서면 더 이상 개선되지 않습니다.샘플 속도를 더 높이면 계수 양자화 및 반올림 오류와 같은 유해한 수치 효과로 인해 제어 충실도가 실제로 저하됩니다.
이 보고서에서 설명하겠지만, 서보 유압식 시스템의 경험에 따르면 최적의 샘플 속도는 오일 컬럼 고유 주파수(또는 기타 우세한 동적 모드)로 정의되는 시스템 대역폭의 50배입니다. 대부분의 MTS 서보 유압식 시스템의 대역폭은 100Hz 이하이므로 100 x 50 = 5kHz의 샘플 속도면 충분합니다. 이 샘플 속도를 넘어서면 제어 충실도가 거의 또는 전혀 향상되지 않습니다.
수치적 효과로 인해 제어가 저하되는 샘플 속도는 수치적 정밀도, 신호 진폭 및 대역폭, 디지털 필터 차단 주파수 등과 같은 많은 요인에 따라 달라지므로 판단하기 어렵습니다. 샘플 속도는 철저한(고가의) 테스트를 통해서만 찾을 수 있습니다.
샘플 속도를 최적 지점 이상으로 높이면 실시간 하드웨어 비용이 증가합니다. 또한 다음과 같은 기회 비용이 있습니다. 실시간 프로세서 대역폭의 대부분이 제어 충실도를 향상시키지 않는 계산에 소모되기 때문에 AIC(Adaptive Inverse Control)와 같이 충실도를 향상시키는 고급 제어 알고리즘에 남은 대역폭은 거의 없습니다.
이 보고서는 샘플 속도 제어에 대한 설명으로 국한합니다. 컨트롤러에는 다른 샘플 속도(예: 데이터 수집 샘플 속도)가 있습니다. 폐쇄 루프 컨트롤러보다 훨씬 높은 데이터 수집 샘플 속도를 갖는 데에는 합당한 이유가 있습니다.
다음과 같은 주제가 고려됩니다.
- 샘플 속도의 함수로서의 제어 충실도
- 대기 시간의 함수로서의 제어 충실도(센서 피드백 읽기와 서보 밸브식 명령 쓰기 사이의 지연 샘플 수로 정의됨)
- 수치적 효과
이 보고서에서 도달한 결론은 다음과 같이 요약할 수 있습니다.
- 대부분의 MTS 서보 유압식 시스템에 대한 최적의 제어 샘플 속도는 5kHz입니다. 샘플 속도가 높을수록 이점이 거의 없거나 전혀 없습니다.
- 여러 실시간 프로세서 간의 부하 공유를 통해 더 높은 샘플 속도를 얻으면 대기 시간이 증가하여 제어 충실도가 크게 저하됩니다.
제어 충실도는 다양한 대역폭, 샘플 속도, 대기 시간에 대한 일반적인 서보 유압식 시스템의 주파수 응답 분석을 사용하여 분석하고 다음을 비교했습니다.
- 폐쇄 루프 주파수 응답
- 방해 주파수 응답
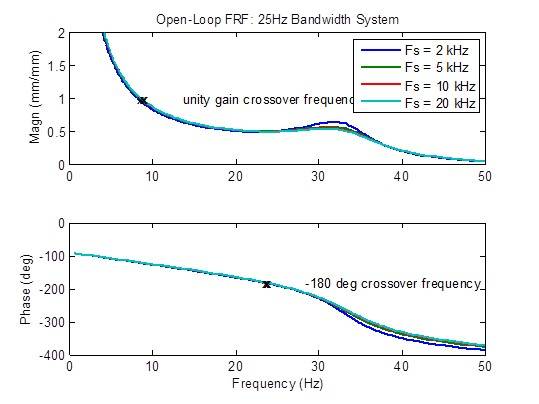
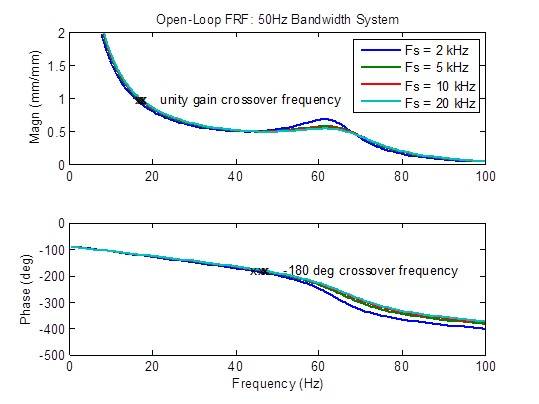
- 개방 루프 안정성 메트릭:단일 게인 및 -180도 크로스오버
서보 유압식 시스템 모델에는 다음과 같은 특성이 있습니다.
- 유압 액추에이터는 분석 및 Simulink 모델링 도구를 개발하는 데 수년간 사용한 "표준" 설계였습니다.
- 페이로드는 질량 전용이었으며, 질량은 25, 50, 100Hz의 오일 컬럼 주파수(대역폭)를 얻기 위해 다양했습니다.
- 서보 밸브식 대역폭은 페이로드 대역폭의 두 배로 제한되었습니다.
- 피드백 조정 대역폭은 페이로드 대역폭의 10배로 설정되었습니다.
- 제어 모드는 변위였습니다.
- 제어 알고리즘은 자동 튜너를 사용하여 각 페이로드 대역폭, 샘플 속도, 대기 시간에 최적화된 튜닝을 구현한 PID(비례-적분-미분)였습니다. 최적화된 게인은 다음과 같습니다. 변위 오류에 대한 비례 게인, 델타-p 안정화 게인, 델타-p 고역 통과 컷인 주파수
이 서보 유압식 모델에 대한 자세한 내용은 Actuator Model.pdf, Actuator Transfer Functions.pdf 및 PID Transfer Functions.pdf를 참조하십시오.
제어 충실도(샘플 속도의 함수로써)
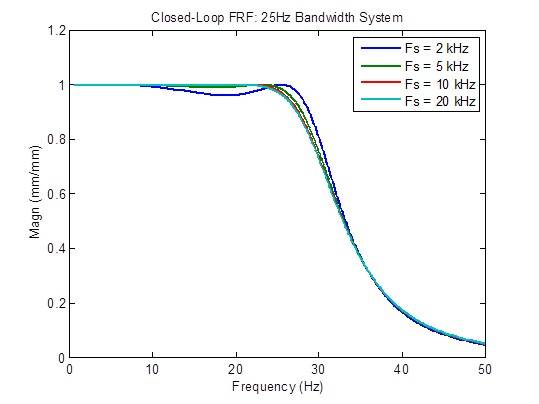
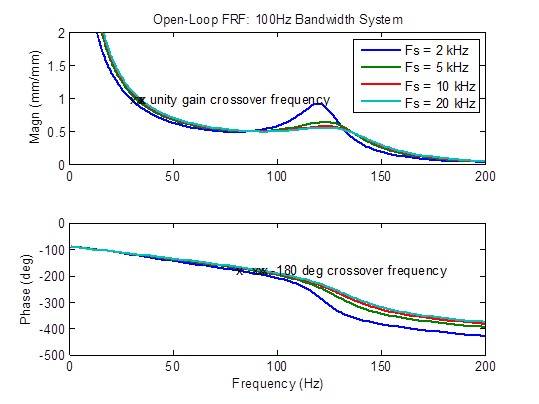
제어 충실도에 대한 샘플 속도의 영향을 확인하기 위해 2kHz, 5kHz, 10kHz 및 20kHz의 제어 샘플 속도와 25Hz, 50Hz 및 100Hz의 시스템 대역폭으로 시스템을 분석했습니다. 대기 시간은 가능한 최소(1.5 컨트롤러 샘플 기간) 수준이었습니다. 폐쇄 루프, 방해 및 개방 루프 주파수 응답 간의 비교는 다음 페이지에 나와 있습니다.
이 도표는 증가된 샘플 속도의 대다수 이점이 샘플 속도를 2kHz에서 5kHz로 증가시켜 얻을 수 있음을 명확하게 보여줍니다. 그 외에는 미미한 개선이 있습니다.
25Hz 대역폭 시스템에서 샘플 속도의 영향
폐쇄 루프 주파수 응답은 샘플 속도가 2kHz에서 5kHz로 증가할 때 다소 향상(평탄)합니다. 그 외에는 미미한 개선이 있습니다.
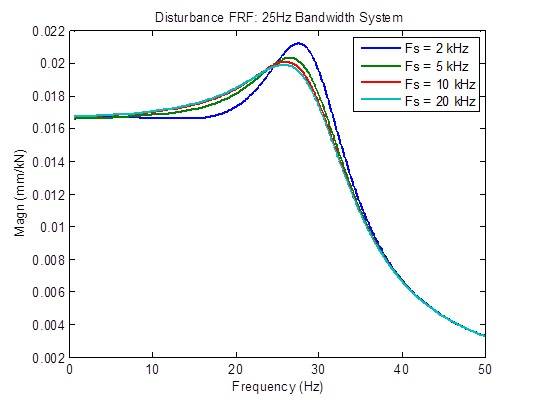
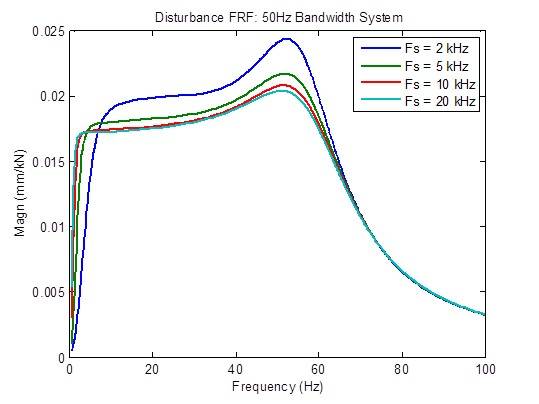
샘플 속도가 2kHz에서 5kHz로 증가하면 방해 응답이 다소 개선(감소)됩니다. 그 외에는 미미한 개선이 있습니다.
샘플 속도가 2kHz에서 5kHz로 증가하면 개방 루프 주파수 응답의 피킹이 약간 감소합니다. 그 외에는 미미한 개선이 있습니다. 안정성 메트릭(크로스오버 주파수)은 대부분 변경되지 않습니다.
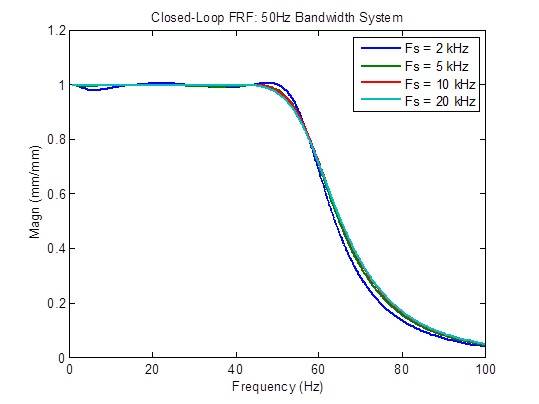
25Hz 대역폭 시스템에서 샘플 속도의 영향
폐쇄 루프 주파수 응답은 샘플 속도가 2kHz에서 5kHz로 증가할 때 다소 향상(평탄)합니다. 그 외에는 미미한 개선이 있습니다.
방해 응답은 샘플 속도가 2kHz에서 5kHz로 증가할 때 약간 개선(감소)되고, 샘플 속도가 5kHz에서 10kHz로 증가할 때 다소 개선됩니다. 그 외에는 미미한 개선이 있습니다.
샘플 속도가 2kHz에서 5kHz로 증가하면 개방 루프 주파수 응답의 피킹이 약간 감소합니다. 안정성 메트릭(크로스오버 주파수)도 다소 개선(높은 주파수)됩니다. 그 외에는 미미한 개선이 있습니다.
100Hz 대역폭 시스템에 대한 샘플 속도의 영향
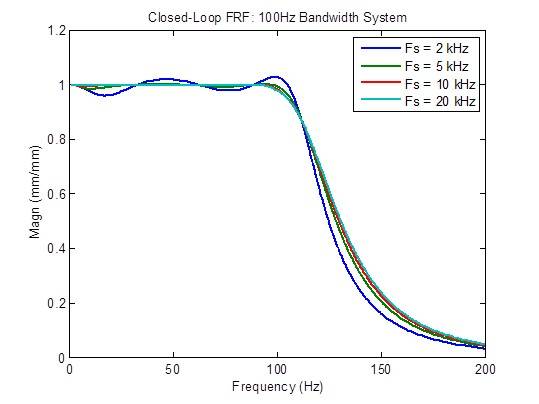
폐쇄 루프 주파수 응답은 샘플 속도가 2kHz에서 5kHz로 증가할 때 상당히 개선됩니다(평탄함). 그 외에는 미미한 개선이 있습니다.
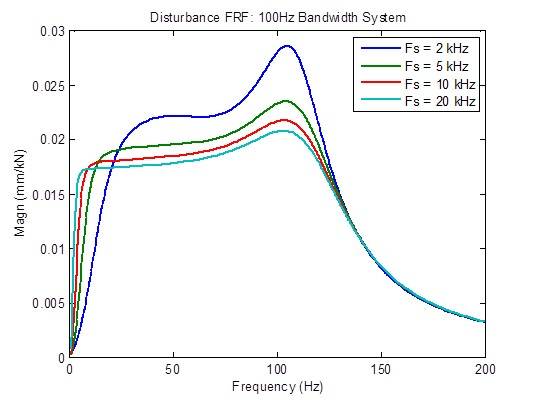
샘플 속도가 2kHz에서 5kHz로 증가하면 방해 응답이 적당히 개선(감소)되고, 5kHz에서 10kHz로 다소 개선됩니다. 그 외에는 미미한 개선이 있습니다.
샘플 속도가 2kHz에서 5kHz로 증가하면 개방 루프 주파수 응답의 피킹이 적당히 감소합니다.안정성 메트릭(크로스오버 주파수)도 약간 개선(높은 주파수)됩니다.그 외에는 미미한 개선이 있습니다.
제어 충실도(대기 시간의 함수로써)
샘플 속도를 높이면 어느 시점에서 단일 실시간 프로세서에 과부하가 걸리며, 이 문제는 더 많은 프로세서를 추가하고 프로세서 간에 계산 부하를 공유하여 해결할 수 있습니다.
그러나 부하 공유는 공식에 따라 센서 피드백 읽기와 서보 밸브식 명령 쓰기 사이의 지연 샘플 수로 정의되는 대기 시간을 증가시킵니다.
대기 시간(샘플) = 프로세서 수 + 0.5
0.5 수치는 디지털-아날로그 변환으로 인한 지연입니다. 가능한 최소 대기 시간은 1.5개 샘플이며, 프로세서가 하나만 있을 때 발생합니다. 프로세서 수로 인한 대기 시간은 한 프로세서에서 다음 프로세서로 신호 데이터 전달을 동기화해야 하기 때문에 발생합니다.
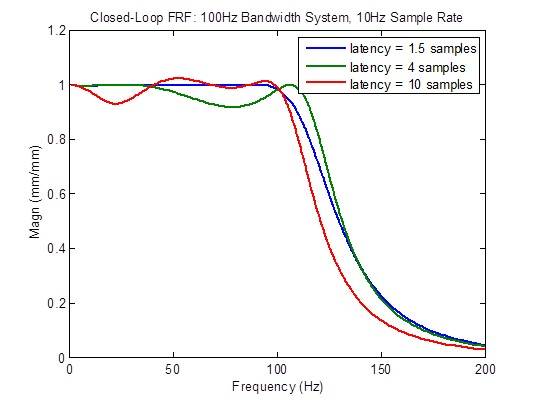
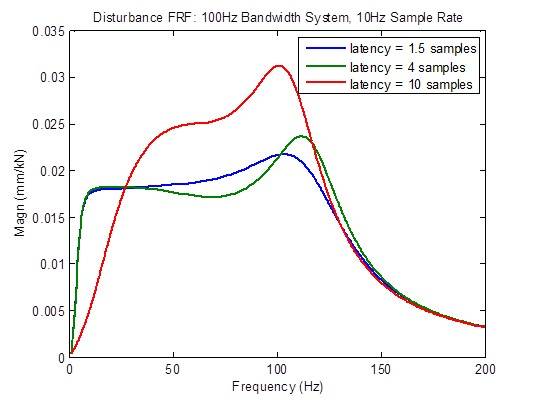
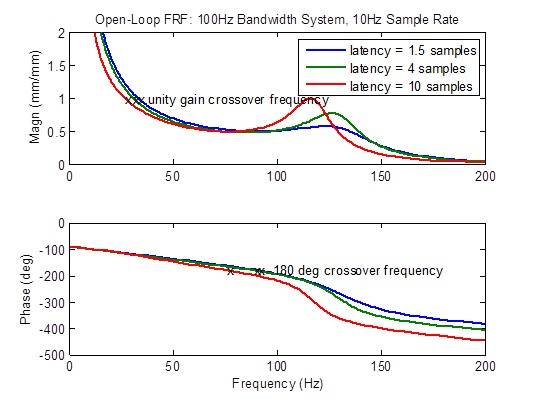
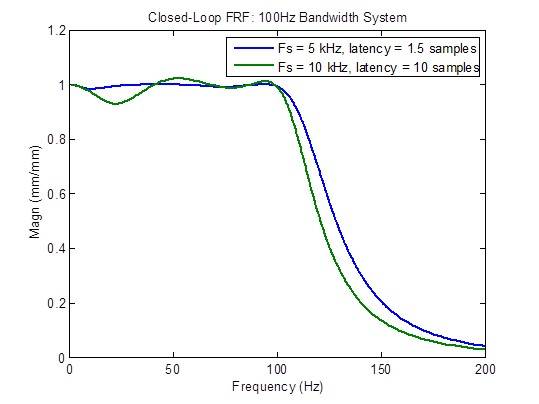
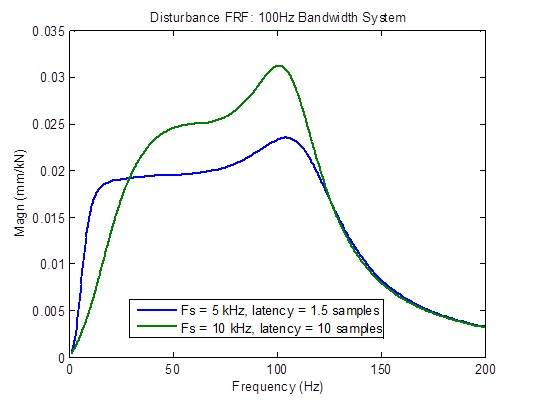
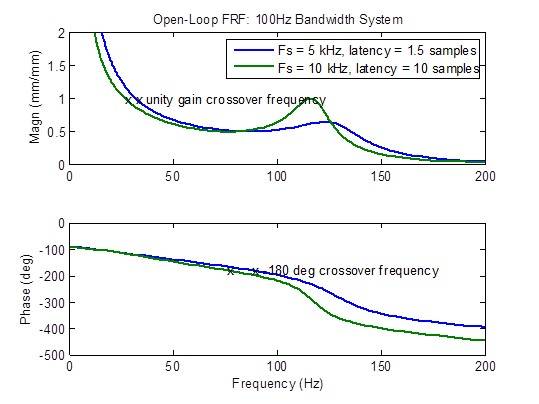
제어 충실도에 대한 대기 시간의 영향을 확인하기 위해 100Hz 대역폭과 10kHz의 샘플 속도를 가진 시스템을 1.5개, 4개 및 10개 샘플의 대기 시간으로 분석했습니다. 폐쇄 루프, 방해 및 개방 루프 주파수 응답 간의 비교는 다음 페이지에 나와 있습니다.
아래 도표는 대기 시간이 최소 1.5개 샘플 이상으로 증가할 때 제어 충실도가 크게 저하된다는 것을 명확하게 보여줍니다.이는 높은 샘플 속도를 달성하기 위해 프로세서를 추가하는 것이 반드시 좋은 것은 아니며, 단일 프로세서의 기능 범위 내에서 낮은 샘플 속도를 사용하는 것이 더 나을 수 있음을 보여줍니다.
참고: 이 분석에 10kHz 샘플 속도와 10개 샘플의 최대 대기 시간을 선택한 이유는 MTS 경쟁업체에서 제공하는 컨트롤러 사양이기 때문입니다.이 섹션의 마지막 도표에서는 해당 경쟁사의 컨트롤러를 5kHz의 최적의 샘플 속도와 1.5개 샘플의 최소 대기 시간을 갖는 컨트롤러와 비교합니다. 결과적으로 경쟁사의 컨트롤러는 명확하게 품질이 낮습니다.
10kHz 샘플 속도의 100Hz 대역폭 시스템에서 대기 시간의 영향
폐쇄 루프 주파수 응답은 대기 시간이 최소 1.5개 샘플보다 클 때 상당히 저하됩니다(덜 평평해짐).
대기 시간이 최소 1.5개 샘플보다 크면 방해 응답이 상당히 저하(높아짐)됩니다. 그러나 현재는 알려지지 않은 이유로 인해 낮은 주파수에서 개선이 있습니다.
개방 루프 주파수 응답은 대기 시간이 최소 1.5개 샘플보다 클 때 상당히 저하(피크 발생)됩니다. 안정성 메트릭(크로스오버 주파수)은 다음과 같이 상당히 저하(낮은 주파수에서 발생)됩니다.
대기 시간이 긴 10kHz 샘플 속도와 100Hz 대역폭 시스템과 최소 대기 시간의 5kHz 샘플 속도와 비교
MTS 경쟁업체는 1밀리초 지연 시간(10kHz에서 10개 샘플)의 10kHz 샘플 속도 컨트롤러가 있다고 주장합니다. 아래의 주파수 도표는 최소 대기 시간(1.5개 샘플)의 5kHz 샘플 속도와 비교할 때 다음과 같은 모든 면에서 열등한 응답임을 명확하게 보여줍니다. 대역폭 감소, 비평탄 폐쇄 루프 주파수 응답, 더 높은 방해 응답, 안정치 유지 저하
수치적 효과
계수 양자화 및 반올림 오류와 같은 해로운 수치 효과는 샘플 속도가 증가함에 따라 악화되며 여러 방식으로 나타납니다.
통합 프로세스에는 예측할 수 없는 통합 속도가 발생하거나 중단될 수 있습니다. 이러한 프로세스의 예에는 램프 함수 생성기 및 PID 컨트롤러 통합기가 있습니다. 램프 생성을 예로 들면 아래 공식은 시간 k - 1에 델타 값 Δ = 통합 속도/샘플 속도를 이전 출력으로 추가하여 시간 k에 램프 값을 생성합니다.
yk = yk-1 + Δ
| 1kHz | 10kHz | 100kHz | |
| a1 = -1.991114 | a1 = -1.999111 | a1 = -1.999911 | |
| a2 = 0.991154 | a2 = 0.999112 | a2 = 0.999911 | |
a1 및 a2 계수는 안정성을 결정하고 반올림 오류 및 양자화 효과에 가장 민감한 계수이기 때문에 이러한 두 계수만 관심 항목입니다. 샘플 속도가 증가하면 9가 아닌 자릿수가 감소합니다. 이는 필터 응답을 결정하는 숫자가 훨씬 적음을 의미합니다. 결국, 샘플 속도가 더 증가함에 따라 계수a1은 -2.0의 값에 접근하고 a2는 1.0의 값에 접근합니다. 필터 계수 양자화는 어느 시점에서 주파수 응답이 불규칙하거나 심지어 불안정한 필터를 초래할 수 있으며, 이때 출력은 0 입력에서도 큰 값으로 진동합니다.
